Система ТМ/ССПИ
Комплекс телемеханики (ТМ)/Система сбора и передачи информации (ССПИ), предлагаемые ГК «ЭнергопромАвтоматизация» - это системы сбора, обработки и отображения информации, необходимые для оперативного управления энергообъектом посредством преобразования управляющих воздействий и контролируемых параметров в сигналы, передаваемые по каналам связи.
Программно-технический комплекс ТМ/ССПИ NPT Expert строится по иерархическому 3-х уровневому принципу:
Нижний (полевой) уровень: микропроцессорные терминалы РЗА, ПА, измерительные преобразователи, устройства сбора информации (УСО) и т.д.
Средний уровень: связь с МП-устройствами, предварительная обработка, передача информации в ЦУС, РЭС, РДУ (КТМ КП) и пр.
Верхний уровень: отображение и архивирование информации (сервер, АРМ).
Особенности системы ТМ/ССПИ ООО «ЭнергопромАвтоматизация»
- Российская разработка технических и программных средств;
- Возможность сбора данных на центральном пункте управления с энергообъектов распределенной сети;
- Интеграция в систему уже установленных сторонних устройств телемеханики;
- Гибкая ценовая политика;
- Возможность выбора технических средств в соответствии с пожеланиями Заказчика;
- Режим реального времени при контроле технического процесса и управления им;
- Эффективное использование каналов связи в условиях ограниченной частотной полосы пропускания каналов;
- Обеспечение совместимости с существующими системами ТМ, ЭВМ ОИК и аппаратурой каналов связи энергообъекта;
- Обеспечение надежности работы оборудования и программного обеспечения в сочетании с оптимизированными финансовыми затратами на внедрение и обслуживание интегрированной автоматизированной системы;
- Возможность расширения системы в дальнейшем до АСУ ТП при увеличении информационного объема.
Структурная схема системы ТМ/ССПИ
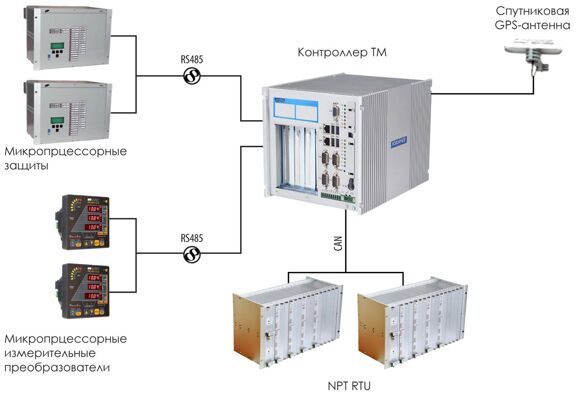
На структурной схеме представлен пример системы ТМ/ССПИ без установки Сервера, АРМ и SCADA NPT Expert на объекте управления. Сервер может находиться непосредственно на пункте управления. Это позволяет снизить стоимость системы и передавать данные напрямую в ЦУС или РДУ.
В качестве устройств нижнего уровня используются УСО собственной разработки – УСО NPT RTU. УСО NPT RTU служат для сбора аналоговых и дискретных сигналов, выдачи команд управления и реализации функций ОБР. Также NPT RTU выполняют функции сбора и обработки информации с МП РЗА, счетчиков электроэнергии и других микропроцессорных устройств. Обеспечивается синхронизация с единым спутниковым временем до 1 мс.
Для небольших объектов возможна передача телемеханической информации напрямую от NPT RTU, т.е. устройство используется в качестве контроллера телемеханики (КТМ).
NPT RTU выпускается в конструктиве меньшего размера для внедрения на энергообъектах с небольшим объемом собираемой и обрабатываемой ТМ-информацией - NPT microRTU.
Контроллер телемеханики (КТМ)
В качестве устройства среднего уровня применяется контроллер телемеханики (КТМ КП). КТМ КП предназначен для обеспечения связи с устройствами сбора данных, предварительной обработки информации, ее промежуточного архивирования и передачи на верхние уровни управления. При построении ССПИ КТМ выполняет также функции станционного контроллера связи и управления и служит для интеграции микропроцессорных устройств полевого уровня (МП РЗА, ПА, РАС и т.п.).
При построении ССПИ связь КТМ с МП РЗА и с другими смежными системами реализуется по интерфейсу RS 485\232: протоколам МЭК 60870-5-103/…/Modbus; по интерфейсу Ethernet: по протоколам МЭК 60870-5-104/МЭК61850. Передача информации от контроллера телемеханики на верхний (подстанционный уровень или уровень пункта управления) реализуется по протоколам Ethernet/TCP/IP/ МЭК 60870-5-104/МЭК 61850.
Количество направлений выделенных каналов связи может доходить до 16: 8 основных и 8 резервных.
Комплекс ПО КТМ работает под управлением операционной системы реального времени. Он выполняет наиболее важные функции регистрации информации и решает следующие задачи:
• регистрация аналоговых параметров установившегося режима;
• опрос состояния коммутационного оборудования;
• регистрация пусков и срабатываний ступеней защит;
• дистанционное управление коммутационным оборудованием;
• опрос и запись параметров МП РЗА (уставок);
• регистрация аварийных событий;
• регистрация осциллограмм аварийных процессов от разных микропроцессорных устройств;
• обмен данными с другими системами автоматизации посредством стандартных протоколов МЭК.
Комплекс ПО КТМ включает в себя следующие модули:
• модуль диспетчера сообщений;
• модуль клиент МЭК 60870-5-101;
• модуль клиент МЭК 60870-5-104;
• модуль клиент МЭК 61850;
• модуль сервер МЭК 60870-5-101;
• модуль сервер МЭК 60870-5-104;
• модуль сервер МЭК 61850;
• модуль МЭК 60870-5-103;
• модуль клиент Modbus-RTU;
• модуль клиент Modbus-TCP;
• модуль логической обработки;
• модуль отображения;
• модуль архивирования.
Автоматизированное рабочее место системы телемеханики (АРМ системы ТМ)

В зависимости от требований Заказчика возможна реализация верхнего уровня системы в исполнении сервера, совмещенного с АРМ системы ТМ. АРМ системы ТМ может быть расположен как непосредственно на контролируемом пункте (подстанции), так и на удаленном пункте управления системой.
АРМ системы ТМ предназначен для отображения текущего состояния принимаемых и передаваемых системой ТМ сигналов, отображения состояния каналов связи, конфигурирования и параметрирования.
В состав функций, реализуемых в АРМ инженера службы ТМ, входят:
- контроль состояния принимаемых и передаваемых сигналов;
- конфигурация объема передаваемой информации в заданном направлении (РДУ, МЭС);
- мониторинг состояния каналов передачи данных;
- диагностика и выдача предупредительных сообщений по состоянию связи с источниками информации.
Преимущества внедрения систем ТМ/ССПИ ООО«ЭнергопромАвтоматизация»
- Пространственно-распределенный модульный принцип построения системы, открытая масштабируемая архитектура ПТК на основе общепризнанных международных стандартов (МЭК 60870-5-101…4, МЭК 61850);
- Легкость модификации системы телемеханики при необходимости ее расширения до системы АСУ ТП/ССПИ;
- Повышение качества наблюдаемости объекта, за счет увеличения количества передаваемой с подстанции информации после полномасштабного интегрирования смежных систем;
- Уменьшение стоимости создания системы, ее обслуживания, а так же развития за счет возможности использования современных отечественных разработок.
